News
- Jul 2026 Several new preprints on vision-language-action models (efficient finetuning, equivariance, diffusion-noise selection, and a unified inference runtime) and on payload-robust humanoid locomotion and whole-body compliance, now under review. Most of this work comes from the many bright VinUniversity students and VinRobotics residents I am grateful to work with. See the publications below.
- Jun 2026 Happy to serve as an Area Chair for CoRL 2026. Looking forward to reading your submissions!
- Jun 2026 Invited talks at ICRA 2026 Workshop on Robot Architecture and the 2nd Next-Gen Robot Learning Symposium on Designing Planning Algorithms for the Era of Parallelism. The slides are available here.
- May 2026 Rarity of rocket-driven Penrose extraction in Kerr spacetime accepted at Physical Review D.
- Oct 2025 Started as Assistant Professor at VinUniversity and Visiting Professor at TU Darmstadt.
- Aug 2025 Joined VinRobotics as Director of Foundation AI, leading RL-for-locomotion, humanoid VLA architecture, and edge-deployment efforts.
- Aug 2025 Successfully defended my Ph.D. thesis on Tensor Search Methods for Vectorizing Motion Planning at TU Darmstadt! You can find the full thesis here. Endless thanks to Prof. Jan Peters for tolerating my mischief and supporting me throughout. I could not have asked for a better advisor. Huge gratitude to Prof. Siddhartha Srinivasa for immediately accepting to serve as external examiner, and to the rest of the committee for their time and feedback.
- Jul 2025 Model Tensor Planning accepted at TMLR 2025 and ICLR 2026 (J2C track). Thanks to the co-authors and reviewers for getting it there.
- Jul 2025 Global Tensor Motion Planning published in IEEE RA-L 2025 and accepted at ICRA 2026.
- Jun 2025 Motion Planning Diffusion published in IEEE T-RO 2025.
- May 2025 Invited talks at RMIT University, Rice University, and HUST on tensor search methods for motion planning.
Research
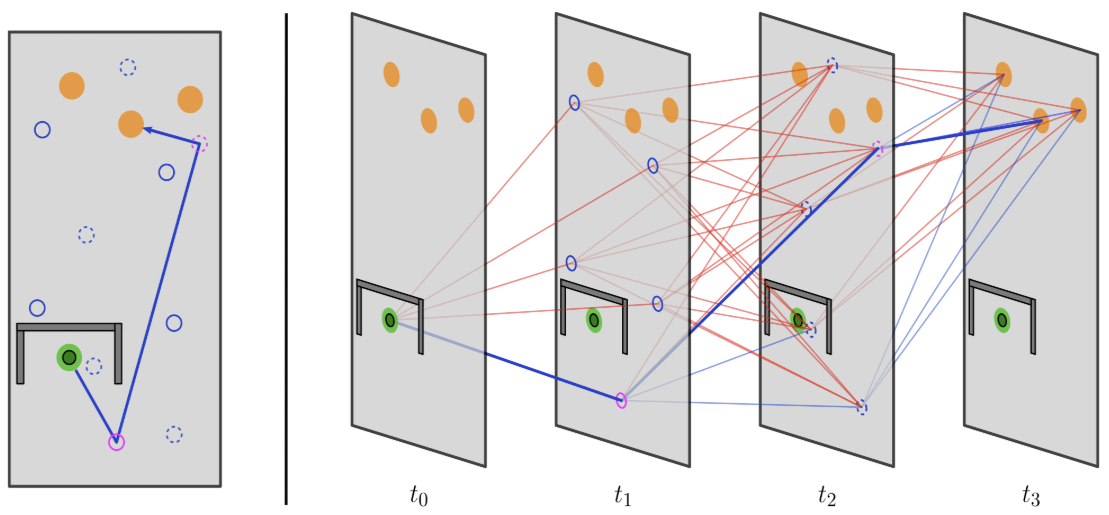
I try to scale planning to settings classical methods struggle with: long horizons, high-dimensional state spaces, large plan sets, many agents. I do this by treating search as a batched tensor operation and by leaning on generative models where structure runs out. Most current work targets humanoid loco-manipulation and vision-language-action models that stay efficient and reliable enough to run on real robots.
Tensor Search & Batched Planning
Casting search and trajectory optimization as batched tensor operations on the GPU, the spine of my thesis and most of my recent planners.
Diffusion & Flow Matching for Motion
Using diffusion and flow matching as priors over trajectories and policies, especially when the solution landscape is multimodal and gradients alone are not enough. Lately, choosing the initial noise itself to make action chunking smoother and more robust.
Humanoid Loco-manipulation
Whole-body RL and model-based control for humanoids in contact-rich tasks: perceptive locomotion that holds up over rough terrain and under payload, and compliant control that yields safely during contact and cooperative carrying. Ongoing, and many things still fall over.
Vision-Language-Action Models
Making VLA policies cheaper to run and steadier on real robots: equivariant architectures, lighter finetuning, better grounding from fewer demos, and inference runtimes for the edge.
Optimal Transport & Gradient Flows
Borrowing entropic OT and gradient-flow machinery to design planners, blend policies, and train networks where standard gradients break down.
Numerical General Relativity
A weekend hobby: JAX/PyTorch CUDA simulators for processes in curved spacetime, including Kerr orbits, Penrose extraction, and warp-drive energy conditions.
Humanoid Demos
Selected humanoid locomotion and manipulation demonstrations from VinRobotics. These videos show sim-to-real RL policies, perceptive stair climbing, and whole-body control running on our own hardware stack.

Compliant Whole-Body Control
Instead of fighting back when pushed, the ~70 kg VR-M3 follows the human body, bends its knees, drops the pelvis, and yields with the force. So compliant we held its hand to co-draw a picture, with a passivity guarantee not to damage it.
Read article →
Perceptive Stair Locomotion
VR-M3 (~60 kg) climbs unfamiliar staircases at 0.6 m/s with a 5 kg payload using onboard terrain sensing and learned locomotion, without LiDAR, mocap, or teleoperation.
Read article →
Human-Level Walking Speed
VR-H3 (178 cm, 85 kg) reaches human-level walking speed via RL-based locomotion with gait reward design, domain randomization, and curriculum learning.
Read article →
Built from the Motor Up
Custom high-torque-density actuators with real-time EtherCAT communication enable 1.5–1.8 m/s dynamic walking. Full native stack, fast iteration.
Read article →
Real-World Football
Humanoid robot participates in a real game, passing, running alongside people, and celebrating goals in an unscripted outdoor environment.
Read article →
Global Debut
Platform preview for Computex and ICRA 2026: whole-body teleoperation, dynamic payload handling, MPC + RL locomotion, and perception-action learning.
Read article →Selected Publications
* indicates co-first or co-last authors. See also my Google Scholar profile.
-
 ★ FeaturedRoboGaze: Evaluating Robot World Models via Structured Vision-Language Analysis
★ FeaturedRoboGaze: Evaluating Robot World Models via Structured Vision-Language Analysis -
 ★ FeaturedWhole-Body Compliance for Heavy Humanoids via Force Latent Estimation and Residual Impedance Targets
★ FeaturedWhole-Body Compliance for Heavy Humanoids via Force Latent Estimation and Residual Impedance Targets -
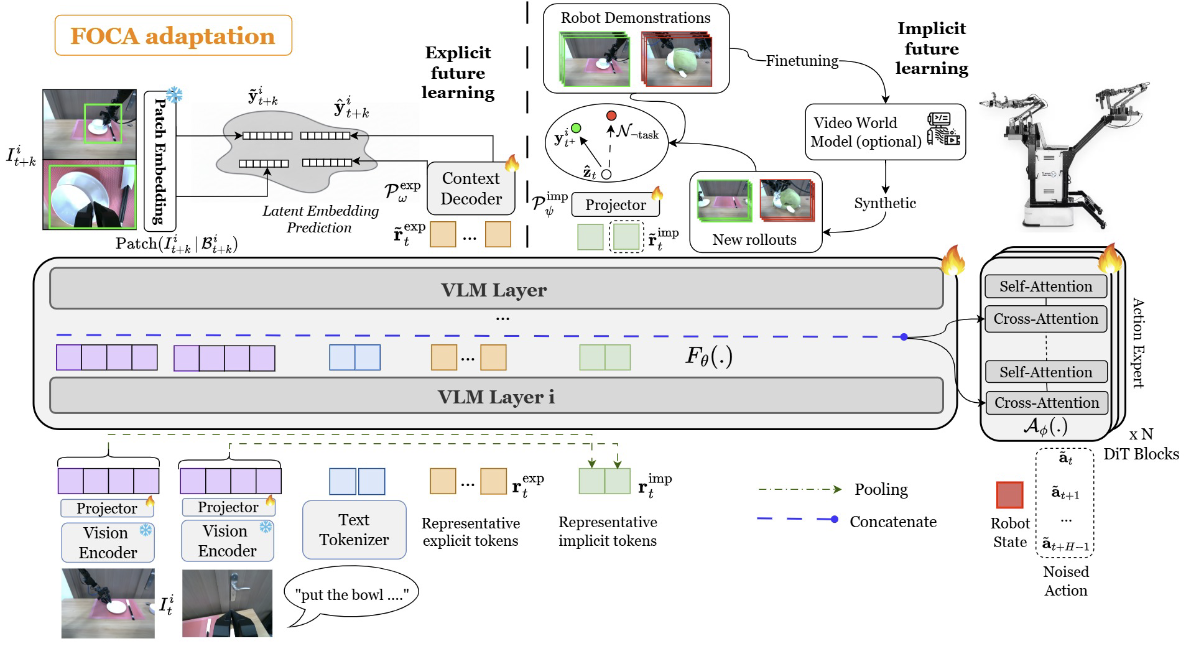
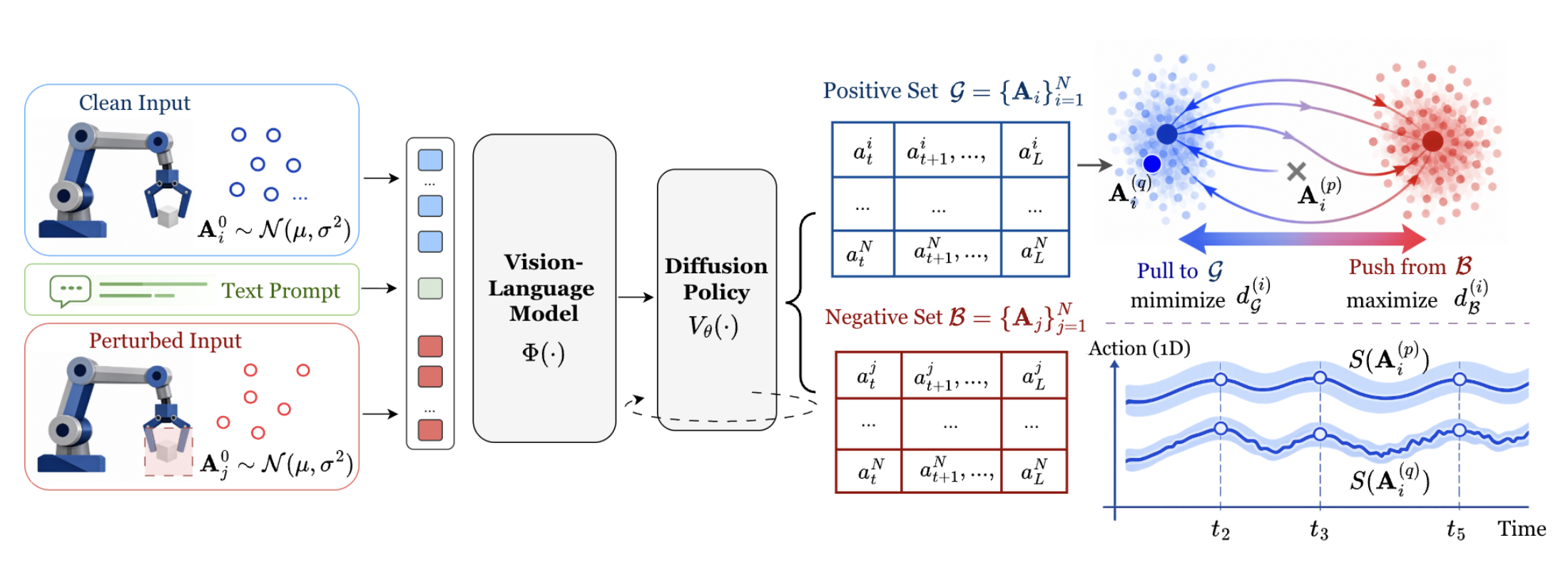 Self-Improving VLA Policies: Selected Diffusion Noise for Spurious-Robust Action Smoothing
Self-Improving VLA Policies: Selected Diffusion Noise for Spurious-Robust Action Smoothing -
 ★ FeaturedTACT-ful: Multi-Channel Terrain Affordance and Compliance Training for Payload-Robust Perceptive Humanoid Locomotion
★ FeaturedTACT-ful: Multi-Channel Terrain Affordance and Compliance Training for Payload-Robust Perceptive Humanoid Locomotion -
 Start Right, Arrive Right: Asynchronous Execution via Initial Noise Selection
Start Right, Arrive Right: Asynchronous Execution via Initial Noise Selection -
 ★ FeaturedEquiVLA: A General Framework for Rotationally Equivariant Vision-Language-Action Models
★ FeaturedEquiVLA: A General Framework for Rotationally Equivariant Vision-Language-Action Models -
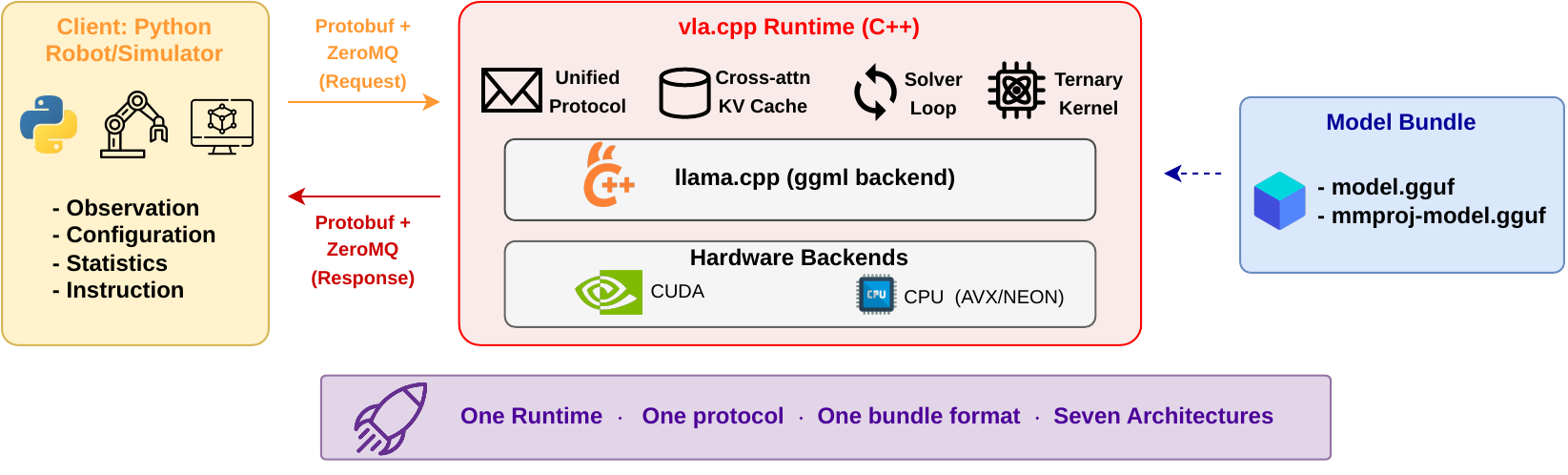 ★ Featuredvla.cpp: A Unified Inference Runtime for Vision-Language-Action Models
★ Featuredvla.cpp: A Unified Inference Runtime for Vision-Language-Action Models -
 Finetuning Vision-Language-Action Models Requires Fewer Layers Than You Think
Finetuning Vision-Language-Action Models Requires Fewer Layers Than You Think -
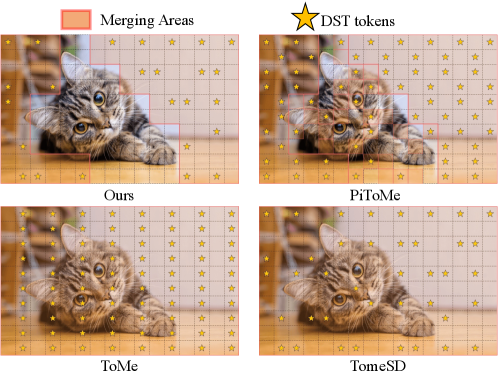 StructSAM: Structure- and Spectrum-Preserving Token Merging for Segment Anything Models
StructSAM: Structure- and Spectrum-Preserving Token Merging for Segment Anything Models -
 ★ FeaturedTraining Non-differentiable Networks via Optimal Transport
★ FeaturedTraining Non-differentiable Networks via Optimal Transport -
 ★ FeaturedAAC: Admissible-by-Architecture Differentiable Landmark Compression for ALT
★ FeaturedAAC: Admissible-by-Architecture Differentiable Landmark Compression for ALT -
 CLOT: Multi-Robot Motion Planning Via Collaborative Optimal Transport under Signal Temporal Logic Tasks
CLOT: Multi-Robot Motion Planning Via Collaborative Optimal Transport under Signal Temporal Logic Tasks -
-
 ★ FeaturedObserver-robust energy condition verification for warp drive spacetimes
★ FeaturedObserver-robust energy condition verification for warp drive spacetimes -
-
 ★ Featured
★ Featured -
 ★ Featured
★ Featured -
-
 DoublyAware: Dual Planning and Policy Awareness for Temporal Difference Learning in Humanoid Locomotion
DoublyAware: Dual Planning and Policy Awareness for Temporal Difference Learning in Humanoid Locomotion -
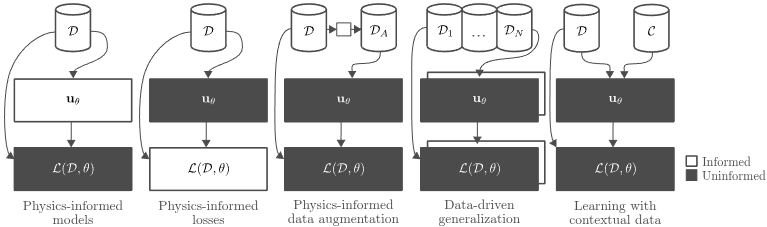 Machine Learning with Physics Knowledge for Prediction: A Survey
Machine Learning with Physics Knowledge for Prediction: A Survey -
 FlowMP: Learning Motion Fields for Robot Planning with Conditional Flow Matching
FlowMP: Learning Motion Fields for Robot Planning with Conditional Flow Matching -
-
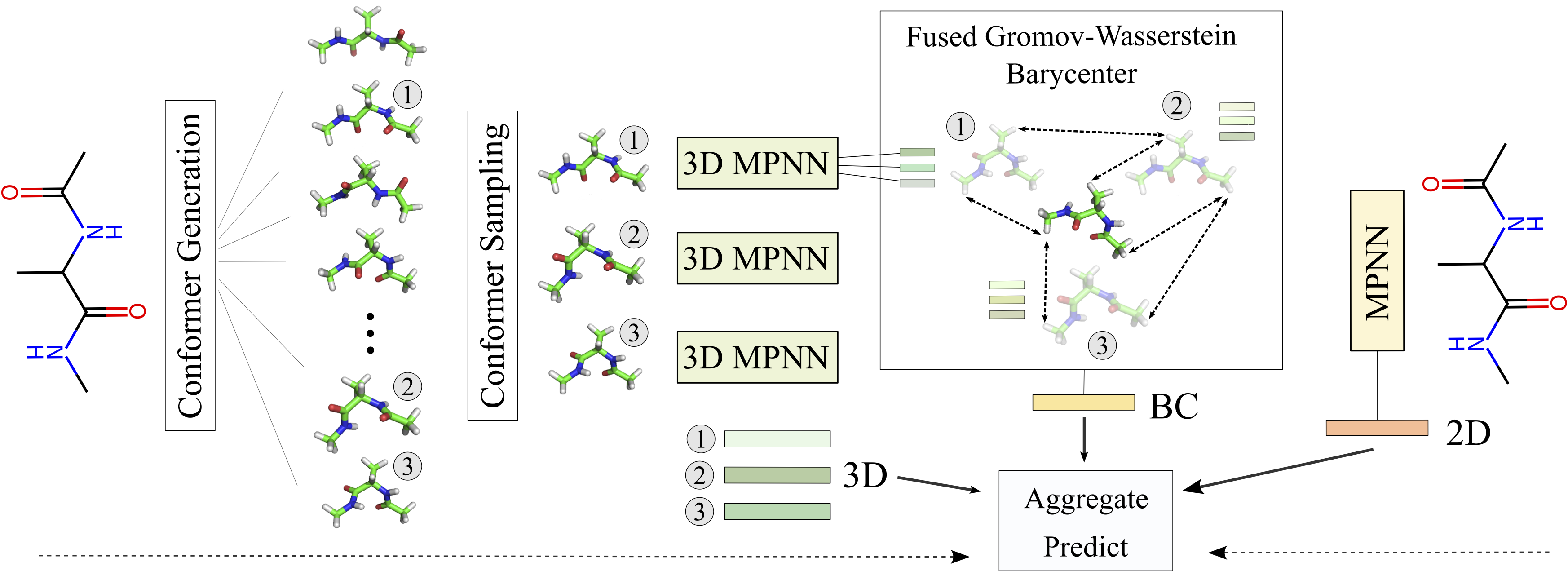 Structure-Aware E(3)-Invariant Molecular Conformer Aggregation Networks
Structure-Aware E(3)-Invariant Molecular Conformer Aggregation Networks -
-
-
-
-
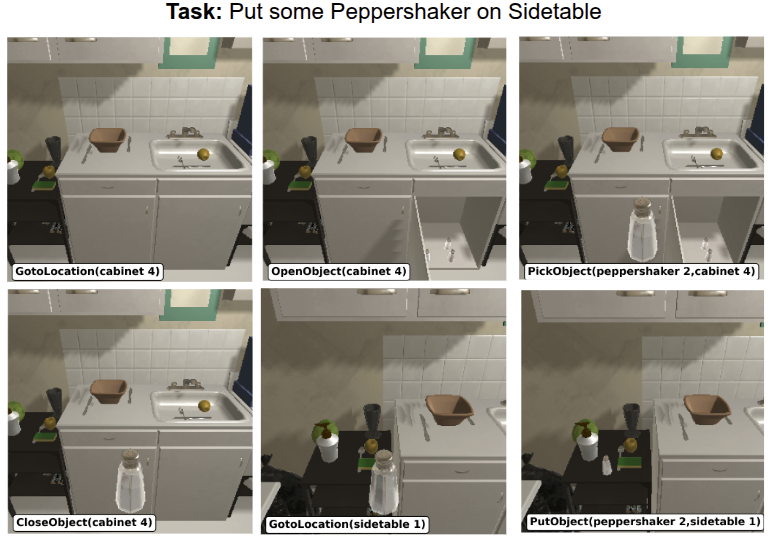 Learning to reason over scene graphs: a case study of finetuning GPT-2 into a robot language model for grounded task planning
Learning to reason over scene graphs: a case study of finetuning GPT-2 into a robot language model for grounded task planning -
-
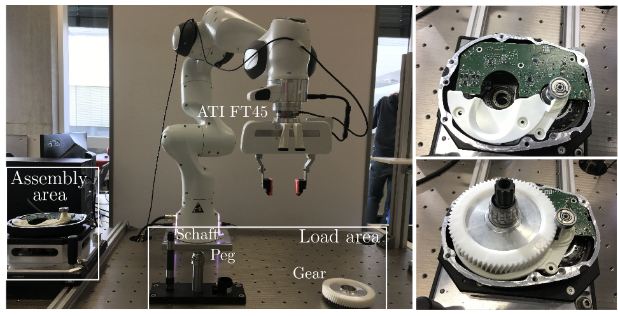 Learning forceful manipulation skills from multi-modal human demonstrations
Learning forceful manipulation skills from multi-modal human demonstrations -
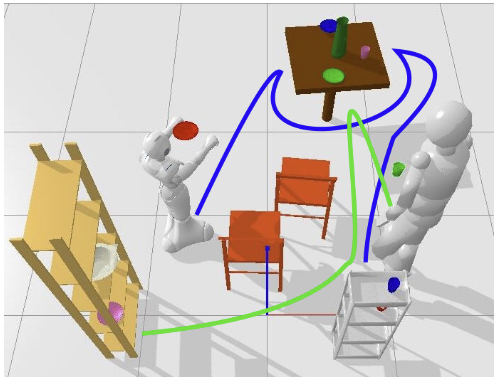 Hierarchical Human-Motion Prediction and Logic-Geometric Programming for Minimal Interference Human-Robot Tasks
Hierarchical Human-Motion Prediction and Logic-Geometric Programming for Minimal Interference Human-Robot Tasks
Open Source
A collection of notes and examples on model deployment.
Differentiable, architecturally admissible compressor (AAC) for A* search.
Training non-differentiable networks via optimal transport.
Observer-robust energy condition verification for warp drive spacetimes.
Model Tensor Planning in JAX. TMLR 2025 & ICLR 2026.
Penrose energy extraction simulation in Kerr spacetime.
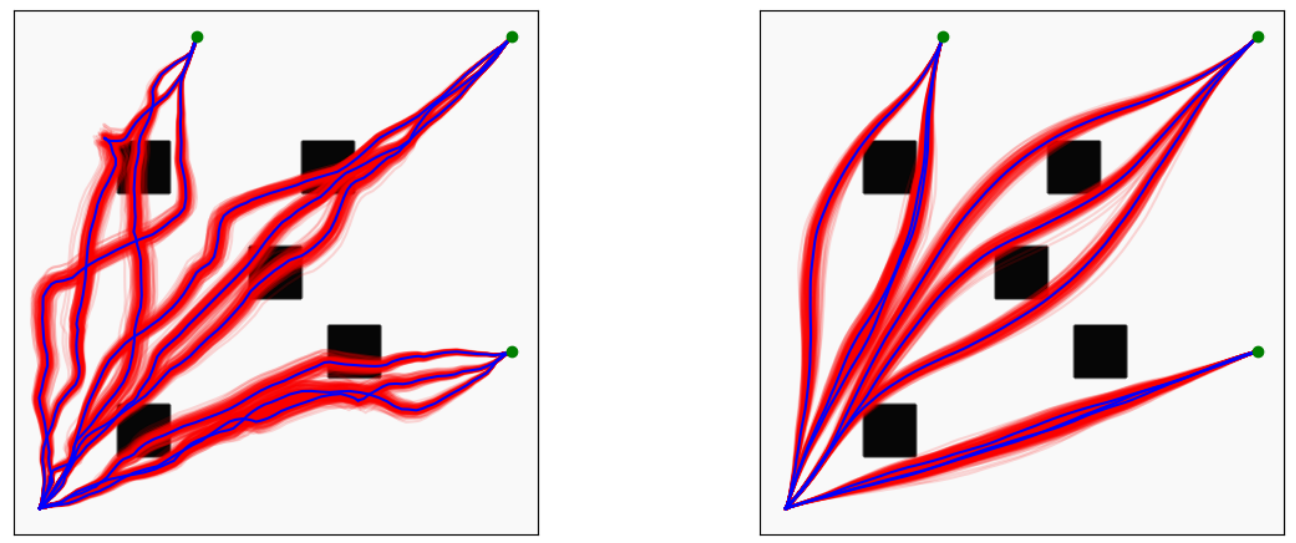
Motion Planning via Optimal Transport (MPOT) in PyTorch. NeurIPS 2023.
Global Tensor Motion Planning (GTMP) in JAX. RA-L 2025 & ICRA 2026.
A unified inference runtime for VLA models.
RL training pipeline for high-payload humanoid locomotion, built on MuJoCo-warp.
Practical quantization recipes for LLMs and speech models, from preparation through deployment-oriented validation.
Sampling-based model predictive control on GPU with JAX / MJX.
Experience
Visiting Professor
Co-advising MSc and PhD students at IAS on robot learning research.
Assistant Professor
Building a research group on efficient learning and planning for robotics loco-manipulation, designing fundamental algorithms and methods.
Director of Foundation AI
- RL stack for high-payload humanoid locomotion
- Humanoid VLA architecture and training recipe
- Model optimization and edge-deployment toolchain
Ph.D. in Computer Science
Thesis: Tensor Search Methods for Vectorizing Motion Planning, supervised by Prof. Jan Peters.
Research Intern
Worked on forceful imitation learning applied to E-bike assembly tasks, hosted by Dr. Meng Guo in the robotics team.
M.Sc. Information Technology
Thesis: Learning task-parameterized Riemannian motion policies, supervised by Dr. Jim Mainprice and Dr. Meng Guo. Graduated First class. Info-Preis for Best Diploma Award. Sony Research Award. Deutschlandstipendium.
Research Assistant
Implemented back-end functionalities in the DASH project; maintained and configured HPC systems.
B.Eng. Electrical Engineering and Information Technology
Thesis: Approaches to solve kidnapped robot problem. Graduated First class. DAAD Scholarship. AmCham Scholarship. eSilicon Scholarship.
Engineer Intern
Designed data analysis systems for high-volume manufacturing unit-test data; validated and reported quality of Intel Thunderbolt product manufacturing line.
Teaching
- Reinforcement Learning
- Statistical Machine Learning
- Probabilistic Methods for Computer Science
- Robot Learning Integrated Project / Expert Lab / Mechatronics
People
Masters Students

VinRobotics Residents










Alumni



Current Collaborators







Academic Service
Reviewer - Conferences & Area Chair
Area Chair: CoRL, RLC
Reviewer: IROS, ICRA, R:SS, L4DC, NeurIPS, ICML, ICLR, AAAI
Reviewer - Journals
IEEE RA-L, IEEE T-RO, Neurocomputing, TMLR, Frontiers in Robotics and AI